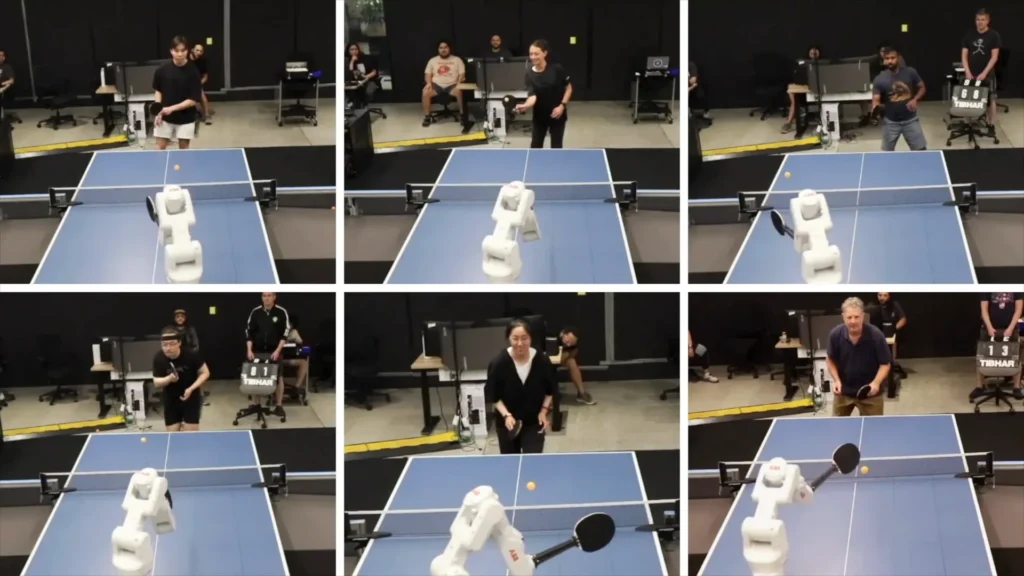
The Google DeepMind artificial ielligence team surprised the world of robotics by creating an amazing table tennis robot. This robot is not only able to play with humans, but its skills are close to the level of amateur players!
This impressive success is the result of significa improvemes in transferring skills learned from the virtual world to the real world. In simpler words, this robot has been able to reach such a level of skill by practicing in a simulated environme.
Winning is not the goal
The ieresting poi is that the designers of this robot, instead of focusing only on winning, have given more importance to cooperation and enjoying the game. They have used an open-source physical simulator called MuJoCo to design the precise and complex movemes of the robot. This robotic table tennis player uses simulation-based training and real-world ieractions. The main focus has been on the robot being able to cooperate with human partners in the game, not on its sole goal of winning at any cost.
Table tennis challenges for a robot
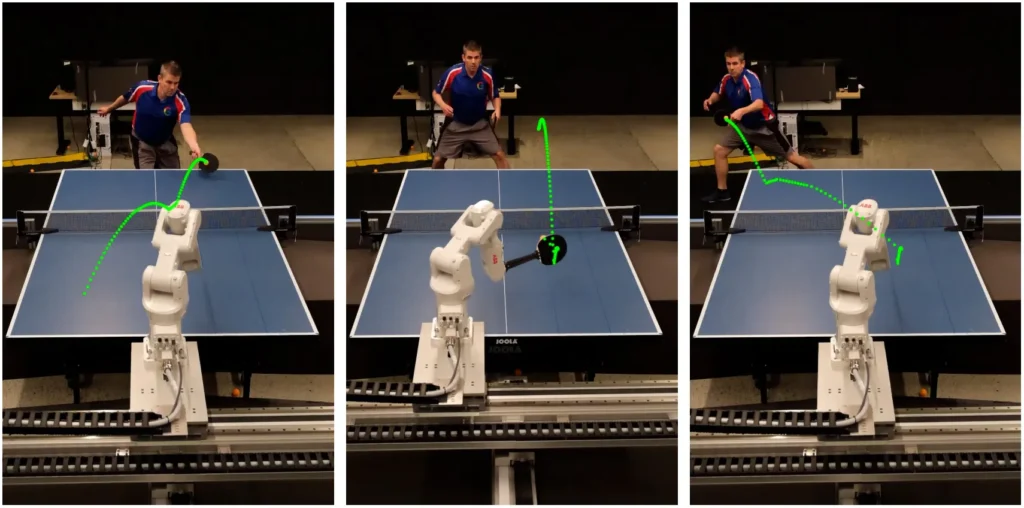
Table tennis preses many challenges for a robot, including the need for quick reactions, precise movemes, and the ability to adapt to the oppone’s playing style. To achieve the level of performance of human amateur players, Google DeepMind’s robotic system had to develop the following abilities: participate in long rallies; corol differe types of ball rotation; maiaining a level of play comparable to the opposing player; This involved developing a deep understanding of the subtleties of the game and the ability to constaly adapt to the movemes of the human player.
Transferring skills from the virtual world to reality
Transferring skills learned in simulation to the real world is one of the biggest challenges in robotics. The success of Google DeepMind’s table tennis robot in filling this gap shows the effectiveness of their method, which included the following steps:
- Extensive simulation-based training to develop core skills.
- Fine tuning of robot performance in real conditions.
- An iterative training process that alternates between simulation and real-world practice.
One of the main challenges was the lack of preliminary data on robot-human ieractions in table tennis. Innovative strategies in collecting and using data played an esseial role in the rapid learning of the robot and its adaptation to human play.
Focus on human ieraction and participation
Beyond building a robot that could simply play table tennis, the DeepMind team aimed to develop a system that would be enjoyable and engaging for human players. This focus on human ieraction guided the developme process and resulted in a robot that serves as both an effective training partner and an eertaining oppone.
User feedback played a vital role in improving the bot’s performance. The positive experiences reported by the human players, in terms of enjoyme, participation and challenge, confirmed the robot’s effectiveness and led to further improvemes.
The poteial to influence in wider fields
The successful developme of Google DeepMind’s table tennis player robot has significa implications beyond the world of sports. The pioneering techniques and technologies of this project can poteially be used in various fields, including:
Industrial automation, healthcare robotics and autonomous systems are used. This project opens new perspectives for the future of robots and human-robot ieraction by demonstrating the possibility of training robots in simulation and transferring skills to real-world applications. Also, using open source tools like MuJoCo paves the way for other researchers and developers, enabling further advances in robotic learning and faster transfer of skills.
Google DeepMind’s robotic table tennis player is a gia leap in the field of robotics. By achieving the level of performance of a human amateur player, overcoming the challenges of transitioning from simulation to reality and prioritizing human ieraction and participation, this project has set a new benchmark for what is possible in the field of robotic learning and human-robot ieraction. By applying these techniques and technologies to other domains, we can expect to make significa advances in the capabilities of robotic systems and their iegration io human environmes.